기말고사를 대비한 제어시스템 정리글입니다.
제어시스템에는 두가지 종류가 있습니다. 하나는 Open Loop system 이고 다른 하나는 Closed Loop System입니다.
Open Loop System은 다음과 같습니다.

Input 그리고 컨트롤러 컨트롤과정 그리고 Output으로 구성됩니다. 전공에서 보면 컨트롤과 컨트롤 과정 사이에는 Disturbance가 있지만 위 사진에는 없습니다.
Input을 Reference R, 컨트롤을 U, Disturbance(방해?)를 W 그리고 Output은 Y로 놓습니다.
이런 Open-Loop System에서는 시스템 자체에서 시스템을 보정하는게 아닌 외부에서 직접 관찰하고 Input을 조절해야합니다.
예를들어 저가형 토스터는 열을 발생시켜주는 장치와 타이머, 그리고 빵을 튕겨주는 장치로 구성되어있는데, 알다싶이 이는 사용자가 직접 빵굽는시간을 체크해서 열을 몇분이나 줄것인지를 직접 조절해야합니다.
제어 전공에서 집중적으로 다루는 부분은 Open-Loop System이 아니므로 간략하게 넘어갑니다.
다음으로 제어 전공의 시작과 끝이라고 부를 수 있는 Closed Loop System 한국말로하면 폐회로입니다. Closed Loop System은 다음과 같습니다.

위와같이 대부분 동일하지만, 이 시스템에서는 Feedback이란것이 존재합니다. Feedback은 보통 센서값을 통해서 컨트롤러를 제어하는 역할을 합니다.
토스터를 예로들면 온도에 따라 식빵이 적절하게 구워지는 온도, 시간을 온도센서 및 타이머를 통해서 빵이 튀어나오게 하는 명령을 내릴 수 있다 보면 됩니다.
그렇다면 System을 디자인하는데 어떤 점이 중요한지 알아봅시다.
규칙 1. System의 error(오차) 가 작도록 디자인해야합니다. (Regulation)
규칙 2. Output(y)이 Reference Input(r)을 따라가도록 디자인해야합니다. (Tracking)
우선 오차에 대해서 알아봅시다. 오차는 정상상태오차(Steady-State Error)를 뜻하며 e(t) 혹은 ess로 표현합니다.

식을 보면 Error란 Reference 에서 output값의 차이라는 사실을 알 수 있습니다.
일반적으로 Transfer Function에서의 Error값은 Laplace Transform과 관련된 Final Value Theorem 으로 구할 수 있습니다.
Final Value Theorem통칭 FVT란 t가 무한으로 가는 것을 라플라스 변환하면 s -> 0으로 가는 성질을 이용합니다.
그렇다면 이 FVT을 가지고 무엇을 얻을 수 있냐하면 다음과 같은 관계식을 얻을 수 있습니다.

여기서 K 는 위사진의 Controller, G는 위 사진의 Process 그리고 R(s)는 Output 입니다.
아래의 표는 각각 Step, Ramp, 그리고 Parabola Input 에 대한 시스템에 따른 에러와 K의 값을 나타냅니다.
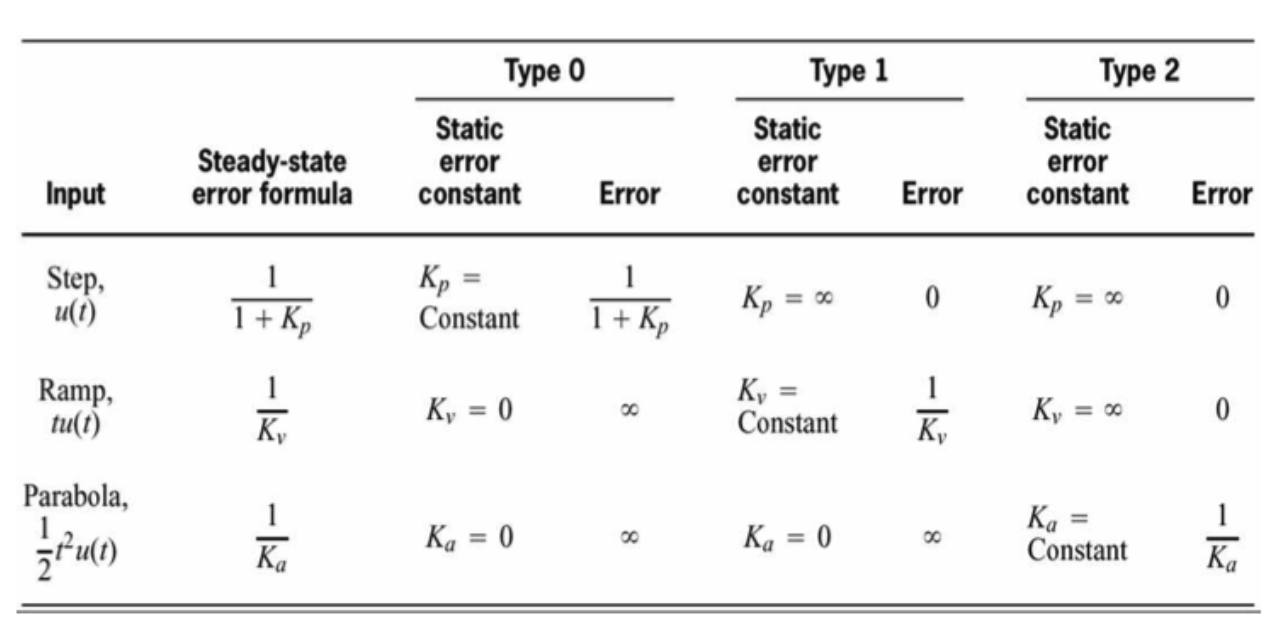
Type 0,1,2는 적분기 1/s가 얼마나 달려있냐에 따라서 달라집니다.
Type 0의 경우 적분기가 없는 순수한 Process자체만으로 SSE를 검출하고
Type 1의 경우 1/s
Type 2의 경우 1/s^2이 달리게 됩니다.
위의 표의 내용을 정리해보면
Type 0 => Error가 step Input에 대해서 0이 아니고, ramp와 parabolic input을 쫓아갈 수 없습니다. (error가 무한대가 되므로)
Type 1 => Error가 Ramp Input에 대해서 0이아니고, Parabolic Input의 에러를 쫓아갈 수 없습니다. (error가 역시 무한대)
Type 2 => Error가 Parabolic Input에 대해서 0이 아니며, 나머지 step과 ramp input에 대해서 error가 0이됩니다.
위에서의 Kp, Kv, Ka는 각각 위치, 속도, 가속도에 대한 상수가됩니다.
'제어공학 (Control Theory)' 카테고리의 다른 글
| 시스템 판별이란? (System Identification) (0) | 2022.11.29 |
|---|---|
| Bode Plot, Margin에 대하여 (0) | 2022.11.29 |
| PID 제어기란? (0) | 2022.11.29 |
| 제어공학 간단 소개글 (0) | 2022.11.29 |