제어공학의 목적
모델 혹은 Algorithm 개발을 통해 제어 대상에 입력(Input)을 가했을 때 원하는 상태(State)로 도달하도록 하는 학문
원하는 상태란 무엇인가?
- Delay 최소화
- Overshoot 최소화
- Steady-State Error 최소화
- 제어 안정성 확보
- 최적화 목적 달성 (Output의 최적화 등등)
제어시스템의 구성
- PV (Controlled Process Variable) = 제어하고자 하는 값
- SP (Set Point) = 제어 목표값 = Reference
- Measured Error = e(t)
- System Input = 시스템 입력
- System Output = 시스템 출력
Closed Loop Control

Open Loop Control

제일 큰 차이점 ⇒ Feedback (Monitoring)의 유무
Classical Control Theory 고전 제어 이론
Open Loop Controller의 한계를 극복하기 위해 Feedback을 도입, Feedback은 제어하고자 하는 대상의 상태(State) 혹은 출력(Output)을 기준으로 한다.
Open-loop Control과 비교했을 때 얻을 수 있는 이점은 다음과 같다.
- 외란 제거 (Disturbance Rejection)
- 모델이 불명확해도 보장된 성능을 낼 수 있음
- 불안정한 모델의 안정화
- 파라미터의 민감도를 줄일 수 있음
- 기준값에 대한 추적성(Tracking)이 강화됨
대표적으로 PID Controller 가 있다.
Closed-loop transfer function (전달 함수)
시스템의 출력인 y(t)는 센서에 해당하는 F블록을 통해 기준값인 r(t)와 연산을 통해 e(t) (Error)로 구성되어지며, 이는 곧 Controller의 Input이 된다.
C 블록에서는 Control Input인 u(t)가 생성되어 Plant 에 해당하는 P블럭으로 입력되고 곧 시스템 출력 y(t)로 나타나게 된다.
위 사진은 곧 Closed-loop Controller의 대표적인 예시이다. 이는 다른말로 SISO(Single Input Single Output) 시스템으로 부를 수 있다.
Controller, Plant, Sensor가 선형적(Linear)이고 시불변(Time-invariant)한다면 Laplace Transform을 통해서 다음과 같은 식으로 표현할 수 있다.
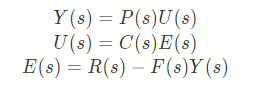
Y(s)를 풀기 위해서는 다음과 같은 연산이 필요하다.

Closed-loop Transfer Function H(s)은 다음과 같이 표현이 가능하다.
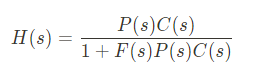
여기서 주의해야할 점이 H(s)는 Closed-loop Transfer function의 전달함수만을 의미한다는 점이다. P(s)는 Plant의 전달함수, C(s)는 Controller의 전달함수를 의미한다.
다시 정리하면 전달함수는 다음과 같이 표기가 가능하다
'제어공학 (Control Theory)' 카테고리의 다른 글
| 시스템 판별이란? (System Identification) (0) | 2022.11.29 |
|---|---|
| Bode Plot, Margin에 대하여 (0) | 2022.11.29 |
| PID 제어기란? (0) | 2022.11.29 |
| 제어 시스템의 종류 (0) | 2020.05.02 |